在探讨人工智能(AI)与具身智能融合的最新趋势中,一场名为「给AI装上身体,具身智能何时能迎来‘ChatGPT时刻’」的OpenTalk直播活动于近期成功举办。此次活动由联合云道资本精心策划,吸引了众多行业内外人士的关注。活动中,小苗朗程管理合伙人方正浩、尧乐科技创始人兼CEO吕莉蕴、灵御智能创始人兼CEO金戈三位嘉宾齐聚一堂,就具身智能的投资逻辑、关键基础设施——柔性触觉传感器,以及具身智能从L0到L4的发展路径等热点话题进行了深入探讨。
方正浩首先分享了具身智能领域的投资见解。他指出,当前具身智能的AI能力尚处GPT3时代,数据采集和预训练仍是挑战。然而,随着大模型通用性和泛化能力的提升,人工智能和具身智能产业链中将涌现巨大投资机会。在人工智能侧,他建议关注下一代新型算力、端侧算力、异构算力混合后的整合机会、多模态和跨模态融合、异构算力调度、推理加速等细分机会,以及C端泛娱乐场景应用和B端垂直行业效率提升应用。在具身智能侧,核心壁垒在于软件层,特别是机器人大脑和小脑层,而硬件层创业公司构建核心壁垒的难度较大。

紧接着,吕莉蕴详细介绍了具身智能的关键基础设施——柔性触觉传感器。她对比了市面上常见的霍尔式、电容式、压电式和压阻式触觉传感器的特点,并分享了尧乐科技在压阻式方案上的创新。尧乐科技通过材料和工艺的改进,使用金属纱线一体化编织生产出了织物压力传感器,解决了耐用性和稳定性问题。吕莉蕴预测,在未来很长一段时间内,织物式传感器和传统电子印刷式传感器将共存,而在大面积和不规则表面柔性适应能力要求高的触觉场景上,织物式传感器更具优势。
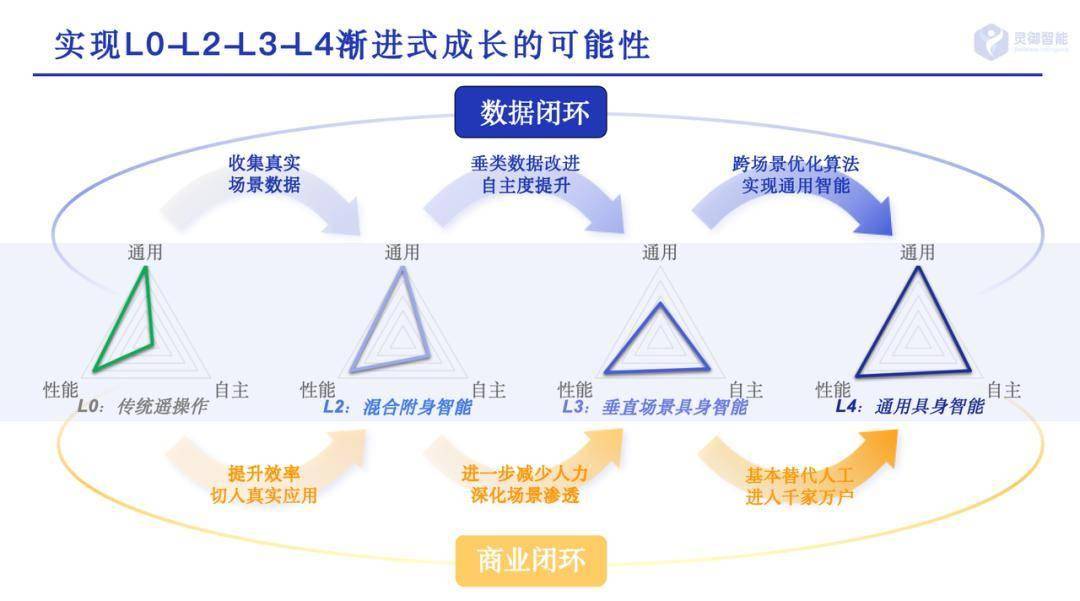
金戈则从灵御智能的角度出发,探讨了具身智能从L0到L4的渐进式发展路径。他观察到,当前具身智能面临通用、性能和自主性的不可能三角问题。金戈介绍了两种提升机器人自主性的方法:直达L4和从L0到L2再到L4的逐步提升。他认为,建立MAAS(Manipulation AS a Service)平台是更经济可行的方法,即日常简单场景由机器人自主操控,复杂和危险情况则由真人或云端模型通过遥操作接管。这种方式既提升了机器人自主性,又满足了用户个性化需求。
直播活动的互动环节同样精彩纷呈。针对观众提出的具身智能项目估值是否过高、赛道是否存在泡沫等问题,方正浩表示,尽管当前存在一定泡沫,但从长远来看,具身智能未来至少是一个万亿美金产业,因此当前估值具备一定合理性。对于具身智能最终将走向通用型人形智能体还是垂直场景专用机器人的问题,他认为两者将并存,人形机器人泛用性高,但垂直场景专用机器人成本更低、可靠性更高。
吕莉蕴和金戈还就触觉数据隐私保护、触觉传感器接口标准建立、中国企业在柔性触觉传感器领域的全球竞争力、触觉数据对具身大模型公司的重要性、工业场景中机器人安全事故责任区分、L4级别具身智能的技术超前性与商业回报平衡等问题进行了深入解答。整场直播活动内容丰富、观点新颖,为观众带来了一场思想盛宴。