在“聚合智能产业发展大会(2025)”上,一场关于机器人触觉感知技术的讨论引发行业关注。他山科技联合创始人兼CEO马扬在接受媒体采访时指出,触觉能力是机器人突破非结构化场景操作瓶颈的核心,这项技术正推动机器人从“程序执行者”向“环境适应者”进化。

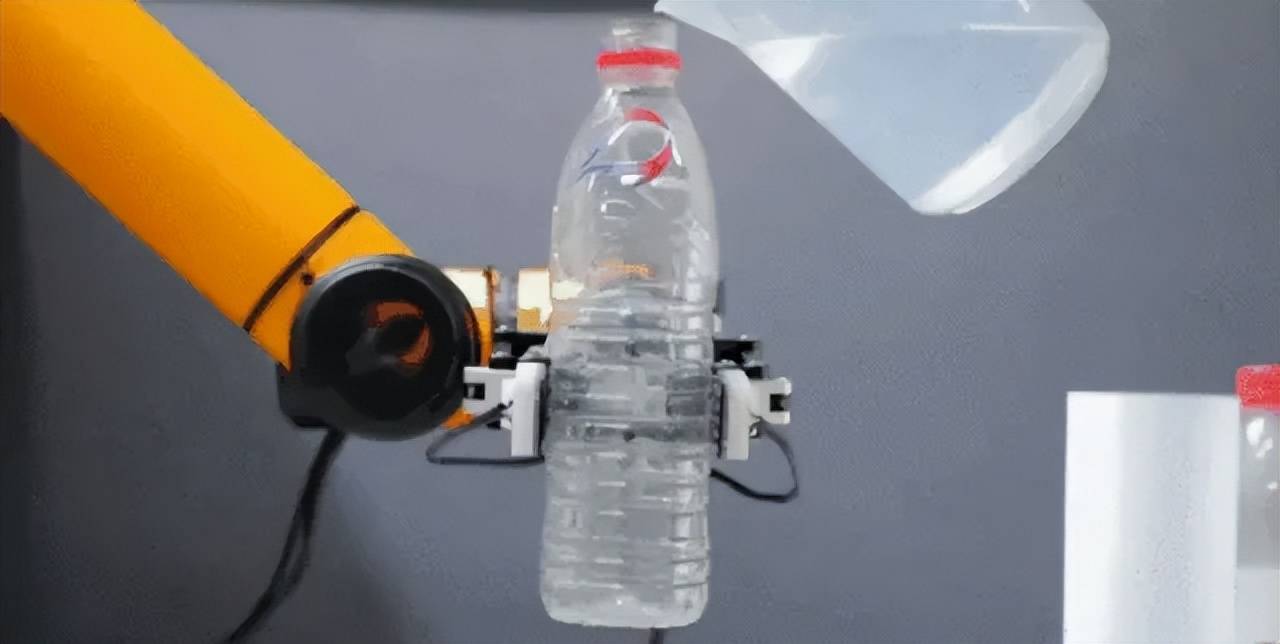
传统工业机器人依赖预设程序完成重复性任务,而具身智能机器人需要实时感知环境并做出决策。马扬用“戴厚手套操作”的比喻解释触觉价值:当人类双手失去触觉反馈时,连抓取水杯这类简单动作都会变得困难,机器人同样需要触觉感知来实现柔性交互。在物流场景中,搭载触觉传感器的机械臂能精准剥离塑料包装;在酒店服务领域,机器人可轻柔递送易碎物品,这些能力都建立在触觉技术突破基础上。
作为国内触觉感知领域的标杆企业,他山科技构建了从底层芯片到触觉模型的全技术链条。2024年,该公司与英伟达达成战略合作,其触觉仿真方案成为Isaac Sim平台首个落地的同类技术。通过“遥操作+仿真生成”的双轨模式,企业成功破解数据采集难题——先通过人工示教完成基础动作训练,再利用仿真平台生成海量虚拟场景,使机器人技能学习效率提升数十倍。这种创新让酒店服务机器人递送准确率突破99.99%,仅需少量真实数据即可完成场景适配。
技术突破背后是严苛的容错要求。与视觉识别60%准确率即可应用不同,触觉操作的失误直接导致物理后果。马扬举例称,医疗机器人缝合血管时,0.1毫米的偏差都可能引发严重事故。这种特性使触觉技术成为机器人实用化的关键门槛:当感知精度从99%提升至99.99%,机器人应用场景将从简单搬运扩展到精密装配、微创手术等高端领域。
当前行业面临“数据-技术”的双向制约:机器人要变智能需海量真实数据,但能进入家庭场景的终端产品仍属少数。他山科技通过分层处理架构破解算力瓶颈,其触觉模型专注实时决策,仅向主系统输出关键语义信息,使多模态交互响应速度提升3倍以上。这种技术路径让机器人能像人类一样“边操作边思考”,在递送物品时同步处理对话指令。
在商业化路径上,马扬预测未来5-10年将迎来爆发期。机器人发展将遵循“技能累积式进化”路线,从单一动作训练起步,逐步整合形成跨场景能力。养老护理领域已显现技术价值:护理机器人通过触觉反馈可轻柔辅助老人翻身,避免人工护理中的体力不支问题;工业场景中,机械臂的触觉控制使重物抓取既突破人体负重极限,又降低工伤风险。
这场技术变革正在重构生产力边界。当机器人拥有可靠触觉感知,它们不仅能替代重复性劳动,更在填补人类服务短板方面展现独特优势。马扬强调:“触觉技术让机器人从工具升级为伙伴,这种转变正在中国创新企业的推动下加速实现。”在物流中心、手术室、养老院等场景,搭载先进触觉系统的机器人已开始书写人机共生的新篇章。