
近日,天津环视智能科技有限公司(简称“环视智能”),一家深耕机器人全向3D视觉感知技术的创新企业,成功完成了千万元级别的天使轮融资。本轮融资由天润嘉诚主导,成都高投参与跟投,并由帕累托森林担任独家财务顾问。所得资金将主要用于加速产品量产进程、开发行业配套解决方案,以及构建更为完善的市场与生产体系。
环视智能自2024年4月成立以来,便专注于机器人感知规划控制技术的研发。其推出的全向3D立体视觉感知标准模组,凭借卓越的性能,已在无人机、无人车、足式机器人及人形机器人等多个领域实现了应用。环视智能还能为量产机器人提供量身定制的解决方案,满足多样化需求。
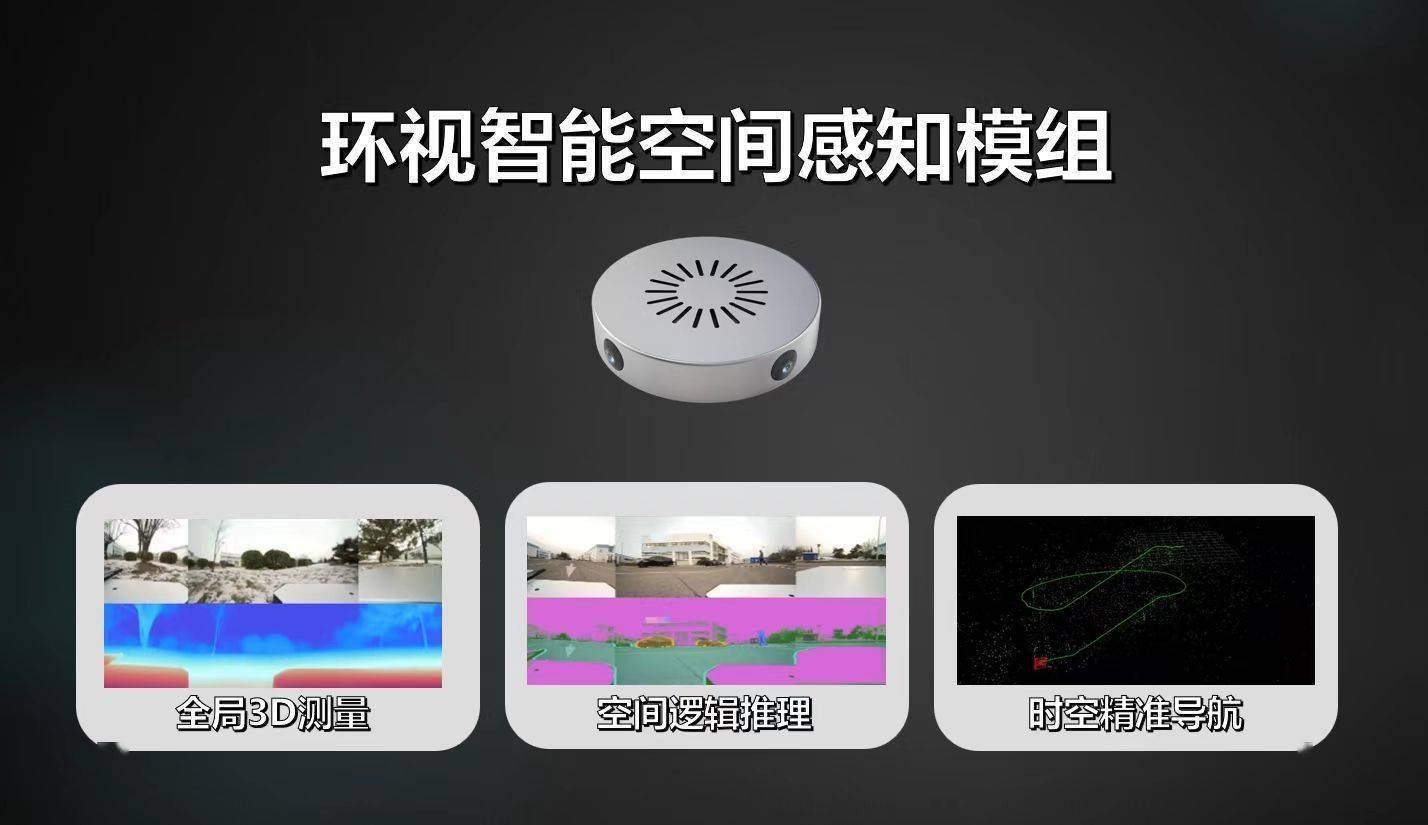
环视智能的核心产品——空间感知模组,正是解决当前机器人感知瓶颈的关键所在。随着机器人行业的蓬勃发展,对感知能力的需求日益提升,从简单的3D视觉向空间智能进化。环视智能创始人孙航指出,行业趋势已从依赖激光雷达转向纯视觉方案,得益于AI技术的飞速发展,纯视觉方案在绝大多数场景中已能与激光雷达相媲美,甚至更胜一筹。
然而,机器人感知的通用化进程仍面临诸多挑战。激光雷达信息密度低、成本高;深度相机视野受限,算力需求巨大;纯视觉方案虽能降低成本,但受限于算力、功耗及数据标注量,难以在成本控制内实现广泛应用。多传感器融合方案则存在噪声叠加、标定复杂等问题。因此,一款具备全向视野、快速计算能力及高性价比的视觉模组显得尤为重要。
环视智能给出的解决方案是一款直径仅10厘米的标准模组,通过4颗200°广角摄像头融合,实现了800°的全向视野,彻底消除了无纹理场景下的感知盲区。模组内置自研的硬件3D空间计算引擎,将3D几何运算与AI推理解耦,仅需10-30TOPS算力即可在边缘端完成全局3D信息、语义理解与意图预测,延迟低于30毫秒,功耗小于5瓦。
孙航进一步解释,这款模组能够确保机器人在任何方向都能获取完备的冗余信息,即使面对白墙等弱纹理场景,也能通过背面或其他方向的信息输入,实现准确的自我定位与导航。这一特性极大提升了机器人在复杂环境中的适应性与稳定性。
在技术路径上,环视智能创新性地提出了“多目融合+硬件加速”的全向3D感知架构,并自研了2D-3D数据复活技术,能够零标注地将客户历史2D图像转化为3D训练集,大幅降低数据成本。同时,其开发的无监督空间学习框架,使机器人在运行过程中不断自我优化,形成可持续迭代的通用世界模型。与业界领先的特斯拉FSD、Intel RealSense等方案相比,环视智能在视野、算力需求及成本方面均实现了显著优势。
成立仅一年时间,环视智能已实现了数百万级别的营收,主要服务于无人机、庭院机器人、清洁机器人及安防类机器人等领域,并获得了高校机器人项目的小批量订单。未来,公司将进一步推动产品量产,扩大应用场景,特别是在无人机、清洁机器人及高校科研等领域的应用。同时,孙航透露,环视智能还将致力于更深层次的端到端产品升级,为机器人行业的发展注入新的活力。
环视智能的核心团队成员来自天津大学博士团队,拥有丰富的机器人技术研发与市场化经验。创始人孙航在校期间便师从知名教授,毕业后在创业企业和大型军工单位担任技术负责人和首席架构师,参与了多项无人机、机器人技术的研发与应用,为环视智能的技术创新奠定了坚实的基础。












